Pytorch介绍
简介
PyTorch是一个很著名的支持GPU加速和自动求导的深度学习框架,在最近几年收到学术界的热捧,主要是因为其动态图机制符合思维逻辑,方便调试,适合于需要将想法迅速实现的研究者。PyTorch是Torch7团队开发的。Torch是一个开源科学计算框架,可以追溯到2002年纽约大学的项目。Torch的核心在于在构建深度神经网络及其优化和训练,为图像,语音,视频处理以及大规模机器学习问题提供快速高效的计算方案。为了追求更高的速度,灵活性和可扩展性,Torch采用Lua作为它的开发语言,但lua语言的受众比较局限。为了满足当今业界里Python先行(Python First)的原则,PyTorch应运而生,由Facebook人工智能研究员(FAIR)于2017年在GitHub上开源。顾名思义,PyTorch使用python作为开发语言,近年来和tensorflow, keras, caffe等热门框架一起,成为深度学习开发的主流平台之一。
特点
- 动态计算:这是PyTorch别于Tensorflow, caffe等框架最大的一点。神经网络在运行时定义创建,并且可以随时查看训练中的tensor值,快速学习网络。PyTorch通过变量的自动反向求导机制,可以零延迟地改变神经网络的学习行为。(Tensorflow2.0中,已经将Eager Execurion变为默认执行模式,由编写静态计算图转向动态计算图。)
- 生态:相比较于比较年轻的PyTorch,TensorFlow由于发布较早,用户基数大,社区庞大,其生态相当完整,从底层张量运算到云端模型部署,TensorFlow都可以做到。
- 适用人群:工业界需要部署效率,所以倾向于TensorFlow;学术界需要模型迭代,所以倾向于PyTorch。
- 使用难度:PyTorch的设计追求最少的封装,尽量避免重复造轮子。PyTorch的设计遵循张量(tensor)→变量(variable)→神经网络模块(nn.Module) 三个由低到高的抽象层次。不像Tensorflow中定义了许多全新而复杂的变量,对于新手来说,PyTorch更加直观,更容易深入API来理解底层代码。
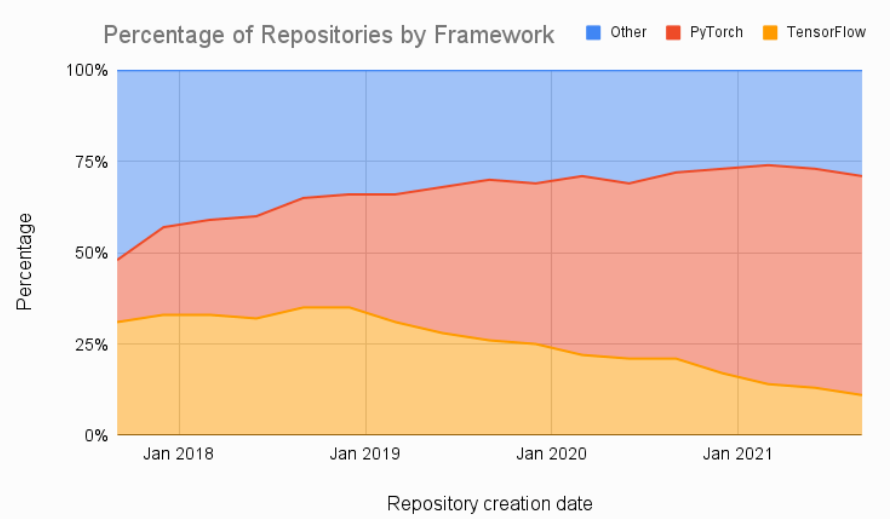
下面是Pytorch和TensorFolow的对比:
在Papers with Code网站上的论文中,大部分都使用的是PyTorch框架,并且还在逐渐上升,TensorFlow的市场份额在逐年下降。
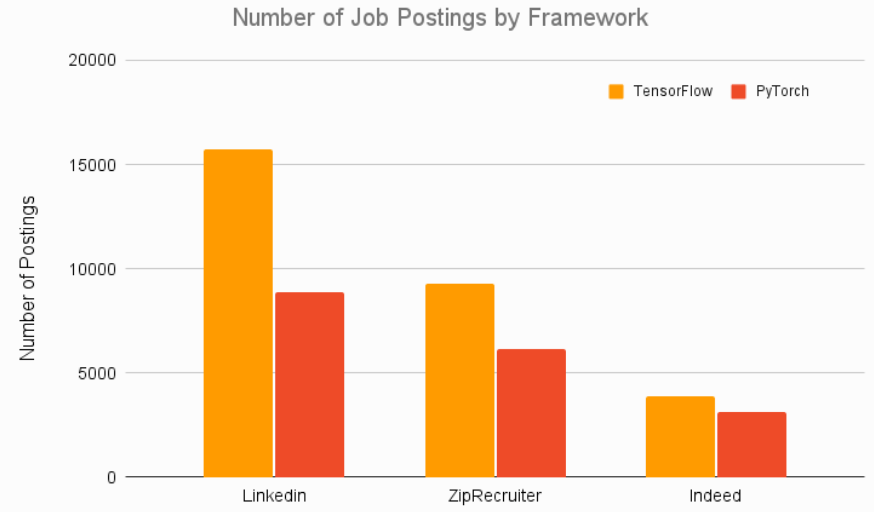
TensorFlow 自成立以来一直是面向部署的应用程序的首选框架,TensorFlow Serving和TensorFlow Lite可让用户轻松地在云、服务器、移动设备和 IoT 设备上进行部署。各大公司在招聘深度学习工程师时,大部分都要求掌握TensorFlow框架。部署便捷性上,TensorFlow完胜。
总的来说,TensorFlow和PyTorch的发展前景都很友好,PyTorch在学术界非常受欢迎,作为深度学习研究者,掌握PyTorch是必要的。
安装
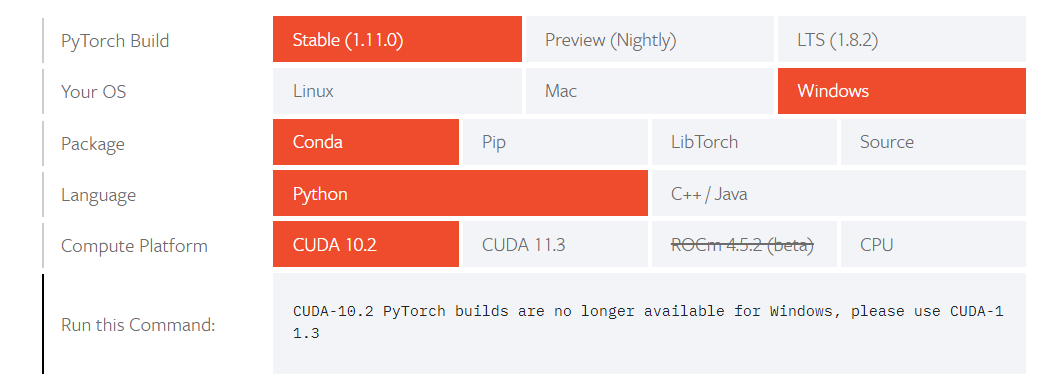
官网:https://pytorch.org/get-started/locally/
在下图中选择需要安装环境的主机的配置情况,然后使用命令行进行安装:
说明:
- PyTorch Build 中的三个选项从左往右代表稳定版,先行版,长期支持版,一般选择第一个即可。
- Package表示使用什么包管理工具安装,依据本机的Python环境选择。
- Compute Platform:表示安装GPU版还是CPU版本,只支持nvidia的显卡,如果本机没有可用显卡,就安装CPU版本,否则选择CUDA安装。注意如果要安装GPU版本,还需要安装对应的GPU驱动,包括对应的CUDA和cuDNN。参考:https://zhuanlan.zhihu.com/p/106133822
Tensor 基础操作
Pytorch 的一大作用就是可以代替 Numpy 库,所以首先介绍 Tensors ,也就是张量,它相当于 Numpy 的多维数组(ndarrays)。两者的区别就是 Tensors 可以应用到 GPU 上加快计算速度。
声明和定义
首先是对 Tensors 的声明和定义方法,分别有以下几种:
torch.empty(): 声明一个未初始化的矩阵。
import torch
# 创建一个 5*3 的矩阵
x = torch.empty(5, 3)
print(x)
tensor([[2.0535e-19, 4.5080e+21, 1.8389e+25],
[3.4589e-12, 1.7743e+28, 2.0535e-19],
[1.4609e-19, 1.8888e+31, 9.8830e+17],
[4.4653e+30, 3.4593e-12, 7.4086e+28],
[2.6762e+20, 1.7104e+25, 1.8179e+31]])
torch.rand():随机初始化一个矩阵
# 创建一个随机初始化的 5*3 矩阵
rand_x = torch.rand(5, 3)
print(rand_x)
tensor([[0.1919, 0.9713, 0.4248],
[0.5571, 0.5543, 0.6414],
[0.4645, 0.4026, 0.3857],
[0.1988, 0.2936, 0.1322],
[0.8525, 0.1780, 0.2909]])
torch.zeros():创建数值皆为 0 的矩阵,类似的也可以创建数值都是 1 的矩阵,调用torch.one
# 创建一个数值皆是 0,类型为 long 的矩阵
zero_x = torch.zeros(5, 3, dtype=torch.long)
print(zero_x)
tensor([[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0]])
torch.tensor():直接传递 tensor 数值来创建
# tensor 数值是 [5.5, 3]
tensor1 = torch.tensor([5.5, 3])
print(tensor1)
tensor([5.5000, 3.0000])
操作(Operations)
操作也包含了很多语法,但这里作为快速入门,仅仅以加法操作作为例子进行介绍,更多的操作介绍可以点击下面网址查看官方文档,包括转置、索引、切片、数学计算、线性代数、随机数等等:
https://pytorch.org/docs/stable/torch.html
"""
几种加法操作:
"""
tensor3 = torch.ones(5, 3)
tensor4 = torch.ones(5, 3)
print(tensor3 + tensor4)
print(torch.add(tensor3, tensor4))
# 新声明一个 tensor 变量保存加法操作的结果
result = torch.empty(5, 3)
torch.add(tensor3, tensor4, out=result)
print(tensor3)
# 直接修改变量
tensor3.add_(tensor4)
print(tensor3)
tensor([[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.]])
tensor([[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.]])
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]])
tensor([[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.]])
注意:可以改变 tensor 变量的操作都带有一个后缀 _ , 例如 x.copy_(y) , x.t_() 都可以改变 x 变量,除了加法运算操作,对于 Tensor 的访问,和 Numpy 对数组类似,可以使用索引来访问某一维的数据。
"""
修改尺寸
"""
x = torch.randn(4, 4)
y = x.view(16)
# -1 表示除给定维度外的其余维度的乘积
z = x.view(-1, 8)
print(x.size(), y.size(), z.size())
print(x)
print(y)
print(z)
torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8])
tensor([[-1.9878, -1.0786, 1.5617, -1.9625],
[ 1.1109, -1.3799, -0.0208, -0.1064],
[-1.5209, -0.4669, -0.5131, -0.9680],
[ 1.2179, -0.4595, 0.0947, 0.5684]])
tensor([-1.9878, -1.0786, 1.5617, -1.9625, 1.1109, -1.3799, -0.0208, -0.1064,
-1.5209, -0.4669, -0.5131, -0.9680, 1.2179, -0.4595, 0.0947, 0.5684])
tensor([[-1.9878, -1.0786, 1.5617, -1.9625, 1.1109, -1.3799, -0.0208, -0.1064],
[-1.5209, -0.4669, -0.5131, -0.9680, 1.2179, -0.4595, 0.0947, 0.5684]])
"""
和 Numpy 数组的转换
"""
import numpy as np
# Tensor 转换为 Numpy 数组
a = torch.ones(5)
# 共享内存
b = a.numpy()
# 新建变量
c = np.array(a)
print(type(b))
print(type(c))
# Numpy 数组转换为 Tensor
a = np.ones(5)
b = torch.from_numpy(a)
print(type(a))
print(type(b))
<class 'numpy.ndarray'>
<class 'numpy.ndarray'>
<class 'numpy.ndarray'>
<class 'torch.Tensor'>
"""
CUDA 张量(在GPU上运算tensors)
"""
# 当 CUDA 可用的时候,可用运行下方这段代码,采用 torch.device() 方法来改变 tensors 是否在 GPU 上进行计算操作
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 定义一个设备对象
y = torch.ones_like(x, device=device) # 显示创建在 GPU 上的一个 tensor
x = x.to(device) # 也可以采用 .to("cuda")
z = x + y
print(z)
print(z.to("cpu", torch.double)) # .to() 方法也可以改变数值类型
tensor([[-0.9878, -0.0786, 2.5617, -0.9625],
[ 2.1109, -0.3799, 0.9792, 0.8936],
[-0.5209, 0.5331, 0.4869, 0.0320],
[ 2.2179, 0.5405, 1.0947, 1.5684]], device='cuda:0')
tensor([[-0.9878, -0.0786, 2.5617, -0.9625],
[ 2.1109, -0.3799, 0.9792, 0.8936],
[-0.5209, 0.5331, 0.4869, 0.0320],
[ 2.2179, 0.5405, 1.0947, 1.5684]], dtype=torch.float64)
autograd 自动求导
对于 Pytorch 的神经网络来说,非常关键的一个库就是 autograd ,它主要是提供了对 Tensors 上所有运算操作的自动微分功能,也就是计算梯度的功能。它属于 define-by-run 类型框架,即反向传播操作的定义是根据代码的运行方式,因此每次迭代都可以是不同的。
接下来会简单介绍一些例子来说明这个库的作用。
torch.Tensor 是 Pytorch 最主要的库,当设置它的属性 .requires_grad=True,那么就会开始追踪在该变量上的所有操作,而完成计算后,可以调用 .backward() 并自动计算所有的梯度,得到的梯度都保存在属性 .grad 中。
而如果是希望防止跟踪历史(以及使用内存),可以将代码块放在 with torch.no_grad(): 内,这个做法在使用一个模型进行评估的时候非常有用,因为模型会包含一些带有 requires_grad=True 的训练参数,但实际上并不需要它们的梯度信息。
对于 autograd 的实现,还有一个类也是非常重要– Function 。
Tensor 和 Function 两个类是有关联并建立了一个非循环的图,可以编码一个完整的计算记录。每个 tensor 变量都带有属性 .grad_fn ,该属性引用了创建了这个变量的 Function (除了由用户创建的 Tensors,它们的 grad_fn=None )。
如果要进行求导运算,可以调用一个 Tensor 变量的方法 .backward() 。如果该变量是一个标量,即仅有一个元素,那么不需要传递任何参数给方法 .backward(),当包含多个元素的时候,就必须指定一个 gradient 参数,表示匹配尺寸大小的 tensor,其本质就是计算雅克比向量(vector-Jacobian)乘积。
import torch
x = torch.ones(2, 2, requires_grad=True)
y = x + 2
z = y * y * 3
out = z.mean()
print(out)
out.backward()
print(x.grad)
tensor(27., grad_fn=<MeanBackward0>)
tensor([[4.5000, 4.5000],
[4.5000, 4.5000]])
# 训练train backward 验证/评估的时候不需要梯度
print(x.requires_grad)
print((x ** 2).requires_grad)
with torch.no_grad():
print((x ** 2).requires_grad)
True
True
False
数据加载
Pytorch的数据加载主要依赖torch.utils.data.Dataset和torch.utils.data.DataLoader两个模块,可以完成如下格式的傻瓜式加载
train_dataset = MyDataset(train_data_path) # 'MyDataset' 是 'torch.utils.data.Dataset' 的继承
train_loader = torch.utils.data.DataLoader(train_dataset)
Dataset介绍
在torch.utils.data.Dataset中我们可以查看Dataset的源码 :
class Dataset(Generic[T_co]):
def __getitem__(self, index) -> T_co:
raise NotImplementedError
def __add__(self, other: 'Dataset[T_co]') -> 'ConcatDataset[T_co]':
return ConcatDataset([self, other])
Pytorch中,任何基于索引读取数据的类均需继承torch.utils.data.Dataset,该类为数据的读取定义了格式。继承后的子类必须重写__getitem__()函数,以此通过给定索引获取对应数据;可以有选择性地重写__len__()函数以返回数据集的大小。
重写 __getitem__() 函数后,我们就可以用索引直接访问对应的数据,如 data[0] 表示获取第一个数据。
重写 __len__() 函数后,我们可以使用 len(data) 来获取数据集的大小,即数据条数。
Dataloader 介绍
DataLoader为我们提供了对Dataset的读取操作,常用参数有:
batch_size(每个batch的大小),即每轮训练使用的数据条数shuffle(True or False,表示是否进行洗牌打乱操作),一般训练集设为True,验证集和测试集设为Falsenum_workers(int类型,表示加载数据的时候使用几个子进程),默认为0,表示使用主进程,推荐和CPU核的个数相同,理论上进程越多加载越块。
举例:
dl = torch.utils.data.DataLoader(ds_demo, batch_size = 10, shuffle = True, num_workers = 0)
# DataLoader返回的是一个可迭代对象,我们可以使用迭代器分次获取数据
idata = iter(dl)
print(next(idata))
# 常见的用法是使用for循环对其进行遍历
for i, data in enumerate(dl):
print(i, data)
内置数据集
torchvision.datasets 可以理解为PyTorch团队自定义的dataset,这些dataset帮我们提前处理好了很多计算机视觉相关的数据集,我们拿来就可以直接使用,具体参见官方文档:https://pytorch.org/vision/stable/datasets.html?highlight=datasets
同样,也有音频和文本数据集,分别在torchaudio.datasets 和 torchtext.dataset 下。
torchvision.datasets 中的 dataset 声明对象时,常用的参数有:
root: 表示数据存储的路径。train: 布尔类型,表示当前声明的dataset是训练集还是测试集。transform: 对数据的转换,下一节会介绍target_transfor:对label的转换download: 布尔类型,表示是否下载数据集,如果root下已经存在数据集,则可以设为 False
举例:
train_data = datasets.CIFAR10(root="../Dataset/CIFAR10", train=True, transform=transform, download=True) # 训练集
test_data = datasets.CIFAR10(root="../Dataset/CIFAR10", train=False, transform=transform, download=True) # 测试集
使用上述方法,则可以得到对应的Dataset 对象,然后使用DataLoader装载数据集。
ImageFolder
上面说了可以使用重载 Dataset 的方式载入自己的数据集,也可以使用 datasets 中官方预设的数据集,此外,还可以使用 ImageFolder 快速加载一个自己的数据集,ImageFolder 假设所有的文件按文件夹保存,每个文件夹下存储同一个类别的图片,文件夹名为类名,比如:
root/dog/xxx.png
root/dog/xxy.png
root/dog/[...]/xxz.png
root/cat/123.png
root/cat/nsdf3.png
root/cat/[...]/asd932_.png
声明一个 ImageFolder ,常用的参数有:
root:在root指定的路径下寻找图片transform:对PIL Image进行的转换操作,transform的输入是使用loader读取图片的返回对象target_transform:对label的转换loader:给定路径后如何读取图片,默认读取为RGB格式的PIL Image对象
ImageFolder 的上层父类是 Dataset,所以可以直接当做Dataset使用,此外,它也有自己的一些特殊属性:
classes (list): 返回按字典序排列后的种类名称class_to_idx (dict): 返回一个字典,表示类名和类编号的映射imgs (list): 返回一个list,每个元素是一个tuple,由图片路径和所属类别编号组成
示例
"""
内置数据集的使用
"""
from torchvision import transforms, datasets
import matplotlib.pyplot as plt
transform = transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
]
)
train_data = datasets.CIFAR10(root="./dataset", train=True, transform=transform, download=False) # 训练50000张
test_data = datasets.CIFAR10(root="./dataset", train=False, transform=transform, download=False) # 测试10000张
len(train_data)
train_data.class_to_idx
type(train_data[1])
plt.imshow(train_data[1][0].numpy().transpose(1, 2, 0))
<matplotlib.image.AxesImage at 0x7f650065ab50>

"""
ImageFolder的使用:
"""
train_dataset = datasets.ImageFolder(root="./dataset/flower_data/train")
val_dataset = datasets.ImageFolder(root="./dataset/flower_data/train")
train_dataset.class_to_idx
train_dataset.imgs[5]
train_dataset.imgs[2000]
type(train_dataset[0])
train_dataset[2200][0].show()

数据预处理
transforms 是图像处理函数,主要用于对索引出来的图片进行 剪切、翻转、平移、仿射等操作,也就是得到我们想要的预处理过程。pytorch 提供的 torchvision.transforms 模块是专门用来进行图像预处理的,主要可以分为以下几种:
- 不同形式图像之间的转换
- transforms——裁剪
- transforms——翻转和旋转
图像形式转换
主要是 PILImage,numpy,Tensor间相互转换。
PILImage是Python图像库PIL(Python Image Library)中的一个类,这是python的第三方图像处理库,但是由于其强大的功能与众多的使用人数,几乎已经被认为是python官方图像处理库了。
ToTensor()
使用 torchvision.transforms.ToTensor() 将PILImage或者numpy的ndarray转化成Tensor
- 对于PILImage转化的Tensor,其数据类型是
torch.FloatTensor - 对于ndarray的数据类型没有限制,但转化成的Tensor的数据类型是由ndarray的数据类型决定的。
# PILImage -> tensor
from PIL import Image
img1 = Image.open('./demo.jpg')
img1.show()
PtoT = transforms.ToTensor()(img1)
print(type(PtoT))
PtoT.shape

<class 'torch.Tensor'>
torch.Size([3, 247, 330])
# ndarray -> tensor
n_out = np.random.rand(100,100,3)
print(n_out.dtype)
t_out = transforms.ToTensor()(n_out)
print(t_out.type())
print(t_out.shape)
float64
torch.DoubleTensor
torch.Size([3, 100, 100])
ToPILImage()
将Numpy的ndarray或者Tensor转化成PILImage类型【在数据类型上,两者都有明确的要求】
ndarray的数据类型要求dtype=uint8, range[0, 255]and shape H x W x CTensor的shape为 C x H x W 要求是FloatTensor的,不允许DoubleTensor或者其他类型
# ndarray -> PILimage
data = np.random.randint(0, 255, 30000)
print(data.dtype)
n_out = data.reshape(100,100,3)
#强制类型转换
n_out = n_out.astype(np.uint8)
print(n_out.dtype)
img2 = transforms.ToPILImage()(n_out)
img2.show()
int64
uint8

# tensor -> PILImage
t_out = torch.randn(3,300,300)
img1 = transforms.ToPILImage()(t_out.float())
img1.show()
裁剪 Crop
主要有:
- 中心裁剪:
transforms.CenterCrop() - 随机裁剪:
transforms.RandomCrop() - 随机长宽比裁剪:
transforms.RandomResizedCrop() - 上下左右中心裁剪:
transforms.FiveCrop() - 上下左右中心裁剪后翻转:
transforms.TenCrop()
翻转和旋转 Flip and Rotation
- 依概率 p 水平翻转:
transforms.RandomHorizontalFlip(p=0.5) - 依概率 p 垂直翻转:
transforms.RandomVerticalFlip(p=0.5) - 随机旋转:
transforms.RandomRotation()
图像变换
- resize:
transforms.Resize - 标准化:
transforms.Normalize - 转为 tensor,并归一化至[0-1]:
transforms.ToTensor - 填充:
transforms.Pad - 修改亮度、对比度和饱和度:
transforms.ColorJitter - 转灰度图:
transforms.Grayscale - 线性变换:
transforms.LinearTransformation() - 仿射变换:
transforms.RandomAffine - 依概率 p 转为灰度图:
transforms.RandomGrayscale
具体使用不进行演示,可以参见:https://blog.csdn.net/Deep_bluce/article/details/111475411
Compose()
transform 方法是一个类,我们有两种处理方式,一个是实例化这个 transform 类,然后把图片传入,另一种方式是实例化一个 transforms.Compose() 类。然后对 transforms.Compose 的实例传入图像处理。区别是如果直接实例化 transform 类,一次只能对图像做一种 transform 操作。但是 transforms.Compose() 类支持传入多个 transform 类,即一个 transforms.Compose() 包含多个 transform 类,这样 一次性能够实现多个操作,如下示例中两种写法等价:
import torchvision.transforms as transforms
pic = imread('...')
#---------方 法 1---------- 一次一种处理方式
transform = transforms.CenterCrop(720) # 中心裁剪
picProcessed1 = transform(pic)
transform = transforms.RandomHorizontalFlip(p=0.5) # 随机水平翻转
picProcessed2 = transform(picProcessed1)
#---------方 法 2----------一步到位
transform = transforms.Compose([
transforms.CenterCrop(720)
transforms.RandomHorizontalFlip(p=0.5)
])
picProcessed = transform(pic)
- torch.nn.Parameter:这是一个类,其本质也是一个
Tensor,只不过被当做模型的参数。即model.parameters()会包含这个parameter。从而,在参数优化的时候可以自动一起优化,这就不需要我们单独对这个参数进行优化,注意的是nn.Parameter=nn.parameter.Parameter - torch.nn.Sequential:一个顺序的容器,将模组添加到里面,在前向传播时,会按照添加的顺序逐一执行容器内的模组。
- torch.nn.Module:所有神经网络模组的基类,Pytorch中所有的神经网络都要继承于这个类。
模型搭建 torch.nn
nn全称为neural network,意思是神经网络,是torch中构建神经网络的模块
torch.nn.functional
该模块包含构建神经网络需要的函数,包括卷积层、池化层、激活函数、损失函数、全连接函数等,具体查看官方文档:https://pytorch.org/docs/stable/nn.functional.html#convolution-functions
注意这个模块中只包含了函数,所谓函数就是输入数据得到对应的输出,只是简单的数学运算,没有自动更新权重的能力,与后面介绍的Modules不太一样。
卷积操作举例如下:
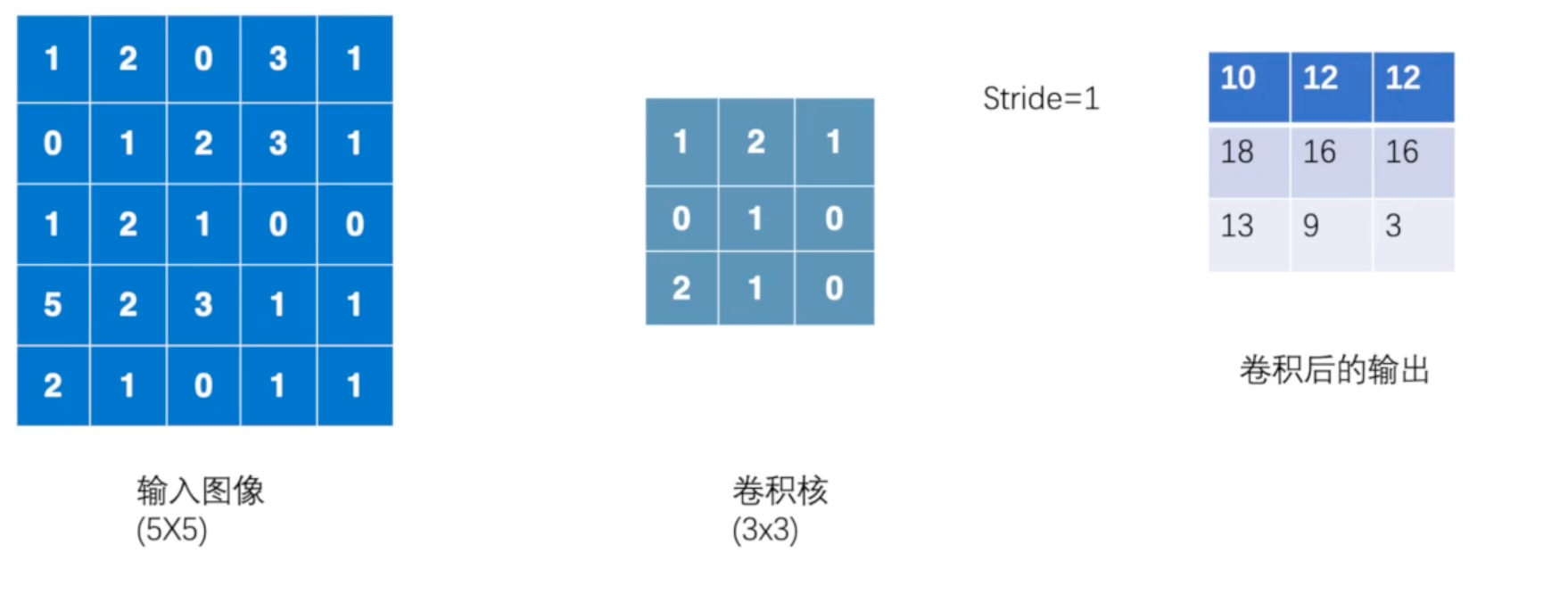
下面用torch.nn.functional.conv2d模拟一下上图的卷积操作:
需要注意的是,在Pytorch中,只要是nn下的包都只支持 mini-batch ,即输入和输出的数据是4维的,每一维度分别表示:(batch大小,输入通道数,高度,宽度),即N*C*H*W,即使只有一张单通道的黑白图片,也要转变为 1*1*H*W的形式。
torch.nnonly supports mini-batches. The entiretorch.nnpackage only supports inputs that are a mini-batch of samples, and not a single sample.For example,
nn.Conv2dwill take in a 4D Tensor ofnSamples * nChannels * Height * Width.
If you have a single sample, just useinput.unsqueeze(0)to add a fake batch dimension.
import torch
import torch.nn.functional as F
x = torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]])
kernal = torch.tensor([[1,2,1],
[0,1,0],
[2,1,0]])
x = torch.reshape(x,[1,1,5,5]) # 拓展成四维
kernal = torch.reshape(kernal,[1,1,3,3])
out = F.conv2d(x, kernal, stride=1)
out
tensor([[[[10, 12, 12],
[18, 16, 16],
[13, 9, 3]]]])
torch.nn.Module
pytorch中其实一般没有特别明显的Layer和Module的区别,不管是自定义层、自定义块、自定义模型,都是通过继承Module类完成的。其实Sequential类也是继承自Module类的。
torcn.nn是专门为神经网络设计的模块化接口。构建于autograd之上,可以用来定义和运行神经网络。
torch.nn.Module 是所有神经网络单元的基类,包含网络各层的定义及forward方法。
pytorch里面一切自定义操作基本上都是继承nn.Module类来实现的。
在pytorch里面自定义层也是通过继承自nn.Module类来实现的。pytorch里面一般是没有层的概念,层也是当成一个模型来处理的。
下面是Module中的一些主要函数:
class Module(object):
def __init__(self):
def forward(self, *input): # 前向传播
def add_module(self, name, module): # 添加模块
def cuda(self, device=None): # 将模型放入GPU
def cpu(self): # 将模型放入CPU
def __call__(self, *input, **kwargs): # 实现对象函数化
# 返回参数
def parameters(self, recurse=True):
"""
Example::
>>> for param in model.parameters():
>>> print(type(param), param.size())
<class 'torch.Tensor'> (20L,)
<class 'torch.Tensor'> (20L, 1L, 5L, 5L)
"""
# 当一个迭代器,可以迭代得到模型的参数,返回的是元组类型(参数名称,参数对象)
def named_parameters(self, prefix='', recurse=True):
def children(self):
def named_children(self):
def modules(self): # 返回网络中的所有模组
"""
Example::
>>> l = nn.Linear(2, 2)
>>> net = nn.Sequential(l, l)
>>> for idx, m in enumerate(net.modules()):
print(idx, '->', m)
0 -> Sequential(
(0): Linear(in_features=2, out_features=2, bias=True)
(1): Linear(in_features=2, out_features=2, bias=True)
)
1 -> Linear(in_features=2, out_features=2, bias=True)
"""
def named_modules(self, memo=None, prefix=''):
def train(self, mode=True): # 训练模式
def eval(self): # 评估模式
def zero_grad(self): # 将模型参数的所有梯度置为0
def __repr__(self): # 使示例化的对象可以用repr()输出
def __dir__(self): # 返回所有的属性名和方法名
CNN的基本层
Convolution Layers
详情见官方文档:https://pytorch.org/docs/stable/nn.html#convolution-layers
Pytorch中实现了很多常用的卷积层,对于图像处理的卷积神经网络来说,最常用的就是 nn.Conv2d,即二维卷积层,这里也以此为例。
nn.Conv2d 也是一个类,继承自 _ConvNd ,而 _ConvNd 又继承自 Module。
声明时主要参数:
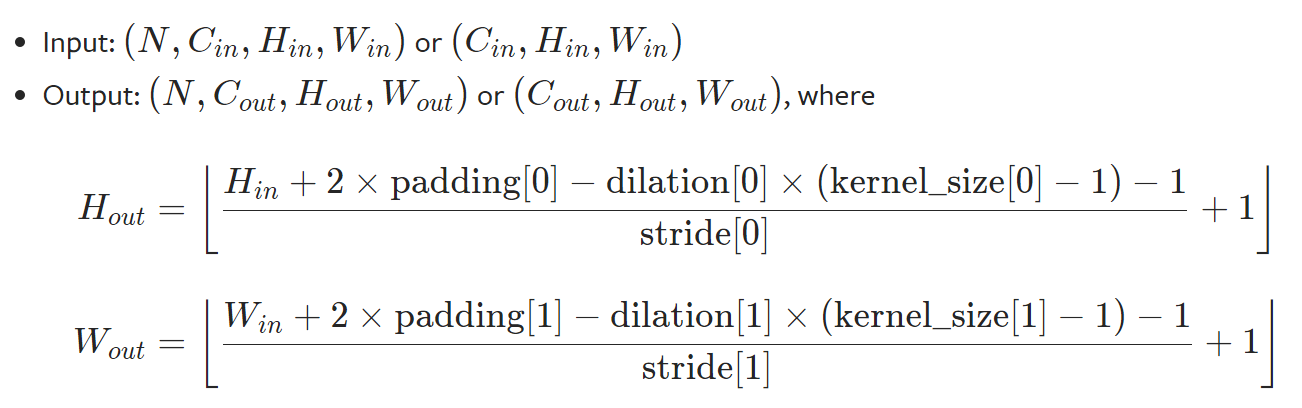
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)
- in_channels (int) – 输入图像的通道数
- out_channels (int) – 卷积层输出通道数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) – 卷积核步长
- padding (int, tuple or str, optional) – 在外层填充圈数,Default: 0
- dilation (int or tuple, optional) – 卷积核中挖洞,Default: 1(表示不挖洞)
- bias (bool, optional) – 是否添加偏置项 Default:
True
其中输入图像和输出图像的大小计算方式如下图:
import torch.nn as nn
# With square kernels and equal stride
conv = nn.Conv2d(16, 33, 3, stride=2, padding=2)
input = torch.randn(20, 16, 50, 100)
print(input.shape)
output = conv(input) ## __call__实习对象函数式调用
output.shape
torch.Size([20, 16, 50, 100])
torch.Size([20, 33, 26, 51])
Pooling layers
具体见官方文档:https://pytorch.org/docs/stable/nn.html#pooling-layers
实现了常用的池化层,如最大池化,平均池化等。以 nn.MaxPool2d 为例:
池化层主要是用于缩小图片的维度,减少冗余特征,从而加快训练速度,经过池化层处理后的图像一般通道数不变,只会改变长宽。
主要参数如下:
- kernel_size – the size of the window to take a max over
- stride – the stride of the window. Default value is kernel_size
- padding – implicit zero padding to be added on both sides
- dilation – a parameter that controls the stride of elements in the window
参数含义类似卷积层,不详细解释,输入输出图像的长宽计算公式:
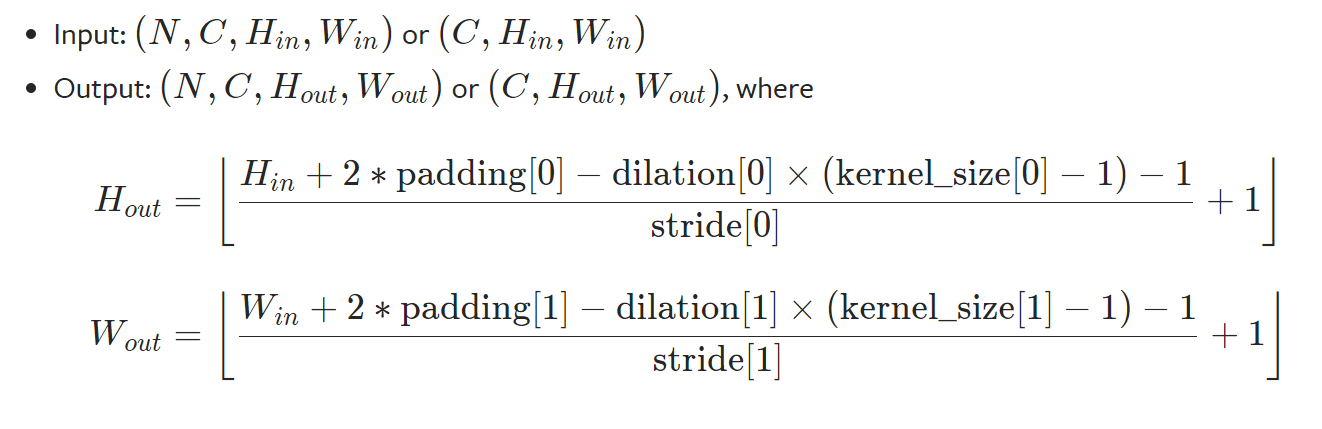
可以看出,计算公式和卷积相同,区别在于卷积层输出的通道数等于卷积个数,池化层输出通道数和输入的相同。
# pool of square window of size=3, stride=2
MaxPool2d = nn.MaxPool2d(3, stride=2)
input = torch.randn(20, 16, 50, 32)
output = MaxPool2d(input)
output.shape
torch.Size([20, 16, 24, 15])
一些其他常用的层
- Non-linear Activations,非线性激活层,比如
nn.ReLUnn.Tanhnn.LogSigmoid等,其中部分可以设置参数inplace,True表示在原数据上操作,False表示新建一个对象计算。 - Normalization Layers,归一化层
- Linear Layers,线性变换层,主要用于改变维度
- Dropout Layers,随机失活层,主要参数
p表示失活概率 - nn.Flatten,展平tensor
搭建一个简易CNN
我们在定义自已的网络的时候,需要继承 nn.Module 类,并重新实现构造函数 __init__ 构造函数和 forward 这两个方法。继承 nn.Module 类在自定义类时即可实现,注意在构造函数中也需要先调用父类的构造函数,forward 接受输入进行前向传播后返回输出结果,由于model类实现了 __call__ ,所以可以直接使用 对象名() 的方式进行前向传播,具体如下:
import torch.nn as nn
import torch
class Model(nn.Module):
def __init__(self):
super(Model,self).__init__()
def forward(self,input):
output = input + 1
return output
model = Model()
x = torch.tensor(1)
model(x)
tensor(2)
在实现__init__ 和 forward 时有一些注意技巧:
(1)一般把网络中具有可学习参数的层(如全连接层、卷积层等)放在构造函数 __init__() 中,当然我也可以把不具有参数的层也放在里面;
(2)一般把不具有可学习参数的层(如ReLU、dropout、BatchNormanation层)可放在构造函数中,也可不放在构造函数中,如果不放在构造函数__init__里面,则在 forward 方法里面可以使用 nn.functional 来代替。
(3)forward 方法是必须要重写的,它是实现模型的功能,实现各个层之间的连接关系的核心。
是否将不具有参数的层放入构造函数的区别在于,只有在构造函数中的层才属于模型的层,其参数才会在训练时被更新,而有些层本来就没有参数无需训练,所以可以不用放在构造函数内,只要在 forward 中实现即可,比如:
import torch
class MyNet(torch.nn.Module):
def __init__(self):
super(MyNet, self).__init__() # 第一句话,调用父类的构造函数
self.conv1 = torch.nn.Conv2d(3, 32, 3, 1, 1)
self.relu1=torch.nn.ReLU()
self.max_pooling1=torch.nn.MaxPool2d(2,1)
self.conv2 = torch.nn.Conv2d(3, 32, 3, 1, 1)
self.relu2=torch.nn.ReLU()
self.max_pooling2=torch.nn.MaxPool2d(2,1)
self.dense1 = torch.nn.Linear(32 * 3 * 3, 128)
self.dense2 = torch.nn.Linear(128, 10)
def forward(self, x):
x = self.conv1(x)
x = self.relu1(x)
x = self.max_pooling1(x)
x = self.conv2(x)
x = self.relu2(x)
x = self.max_pooling2(x)
x = self.dense1(x)
x = self.dense2(x)
return x
model = MyNet()
print(model)
MyNet(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1): ReLU()
(max_pooling1): MaxPool2d(kernel_size=2, stride=1, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu2): ReLU()
(max_pooling2): MaxPool2d(kernel_size=2, stride=1, padding=0, dilation=1, ceil_mode=False)
(dense1): Linear(in_features=288, out_features=128, bias=True)
(dense2): Linear(in_features=128, out_features=10, bias=True)
)
import torch
import torch.nn.functional as F
class MyNet(torch.nn.Module):
def __init__(self):
super(MyNet, self).__init__() # 第一句话,调用父类的构造函数
self.conv1 = torch.nn.Conv2d(3, 32, 3, 1, 1)
self.conv2 = torch.nn.Conv2d(3, 32, 3, 1, 1)
self.dense1 = torch.nn.Linear(32 * 3 * 3, 128)
self.dense2 = torch.nn.Linear(128, 10)
def forward(self, x):
x = self.conv1(x)
x = F.relu(x)
x = F.max_pool2d(x)
x = self.conv2(x)
x = F.relu(x)
x = F.max_pool2d(x)
x = self.dense1(x)
x = self.dense2(x)
return x
model = MyNet()
print(model)
MyNet(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(conv2): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(dense1): Linear(in_features=288, out_features=128, bias=True)
(dense2): Linear(in_features=128, out_features=10, bias=True)
)
torch.nn.parameter
torch.nn.Parameter是继承自torch.Tensor的子类,其主要作用是作为nn.Module中的可训练参数使用。它与torch.Tensor的区别就是nn.Parameter会自动被认为是module的可训练参数,即加入到parameter()这个迭代器中去;而module中非nn.Parameter()的普通tensor是不在parameter中的。nn.Parameter的对象的requires_grad属性的默认值是True,即是可被训练的,这与torth.Tensor对象的默认值相反。在nn.Module类中,pytorch也是使用nn.Parameter来对每一个module的参数进行初始化的。以nn.Linear为例:
class NN_Network(nn.Module):
def __init__(self,in_dim,hid,out_dim):
super(NN_Network, self).__init__()
self.linear1 = nn.Linear(in_dim,hid)
self.linear2 = nn.Linear(hid,out_dim)
self.linear1.weight = torch.nn.Parameter(torch.zeros(in_dim,hid))
self.linear1.bias = torch.nn.Parameter(torch.ones(hid))
self.linear2.weight = torch.nn.Parameter(torch.zeros(in_dim,hid))
self.linear2.bias = torch.nn.Parameter(torch.ones(hid))
def forward(self, input_array):
h = self.linear1(input_array)
y_pred = self.linear2(h)
return y_pred
in_d = 5
hidn = 2
out_d = 3
net = NN_Network(in_d, hidn, out_d)
# 读取parameters,因为net.parameters是个生成器,所以需要去遍历输出
for param in net.parameters():
print(param)
Parameter containing:
tensor([[0., 0.],
[0., 0.],
[0., 0.],
[0., 0.],
[0., 0.]], requires_grad=True)
Parameter containing:
tensor([1., 1.], requires_grad=True)
Parameter containing:
tensor([[0., 0.],
[0., 0.],
[0., 0.],
[0., 0.],
[0., 0.]], requires_grad=True)
Parameter containing:
tensor([1., 1.], requires_grad=True)
torch.nn.Sequential
前面搭建一个简易CNN的章节中,定义了很多层,然后再 forward 实现时需要将这些层连接起来(前一层输出作为后一层输入),这样比较繁琐,对此我们可以使用 Sequential 来实现层的“打包”。
主要有三种使用方法:
************torch.nn.Sequential************
-------顺序容器
#写法一:
net = nn.Sequential(
nn.Conv2d(1, 20, 5)
)
#写法二:
net = nn.Sequential()
net.add_module('conv2d', nn.Conv2d(1, 20, 5))
#写法三:
from collections import OrderedDict
net = nn.Sequential(OrderedDict([
('conv2d', nn.Conv2d(1, 20, 5))
#.....
]))
示例如下:
class Net(nn.Module):
def __init__(self,in_dim,hid,out_dim):
super(Net, self).__init__()
self.layer = torch.nn.Sequential(
nn.Conv2d(1, 20, 5),
nn.ReLU(),
nn.Conv2d(10, 20, 5),
nn.ReLU(),
)
def forward(self, x):
ouput = self.layer(x)
return ouput
模型训练
Pytorch中模型训练步骤还是非常清晰的:
-
数据载入及处理
-
模型定义
-
超参数设置(损失函数定义、优化器定义、训练轮数)
-
训练模型
- 读取一个batch的数据,并前向传播
- 计算损失值
- 反向传播计算梯度
- 优化器优化模型
- 循环执行上述过程直到规定轮数
-
评估模型(非必须)
-
测试模型
其中除了损失函数和优化器的定义和使用没有提到,其余内容在前文都有介绍,下面直接搭建一个CNN网络,展示一个网络的完整训练流程:
"""
依赖包载入、数据集载入和划分
以CIFAR10作为模型训练的数据集,训练集50000张,测试集10000张图片
"""
import torchvision
import torch.nn as nn
import torch
from torch.utils.data import DataLoader
from torchvision import transforms, datasets
transform = transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
]
)
# 准备数据集
train_data = datasets.CIFAR10(root="./dataset", train=True, transform=transform, download=True)
test_data = datasets.CIFAR10(root="./dataset", train=False, transform=transform, download=True)
# length
train_data_size = len(train_data)
test_data_size = len(test_data)
print("训练数据集长度为:{} \n验证数据集的长度为:{}".format(train_data_size, test_data_size))
# 利用DataLoader加载数据集
train_dataloader = DataLoader(train_data, shuffle=True,batch_size=32, num_workers= 15)
test_dataloader = DataLoader(test_data, shuffle=False,batch_size=10000, num_workers= 15)
# test_iter = iter(test_dataloader)
# test_imgs, test_labels = test_iter.next()
# test_imgs.shape
# test_imgs = test_imgs.to(device)
# test_labels = test_labels.to(device)
Files already downloaded and verified
Files already downloaded and verified
训练数据集长度为:50000
验证数据集的长度为:10000
"""
搭建LeNet网络
"""
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
self.model = nn.Sequential(
nn.Conv2d(3, 16, 5), # input_size:[3,32,32] out_size: [16,28,28]
nn.Sigmoid(),
nn.AvgPool2d(2), # input_size: [16,28,28] out_size: [16,14,14]
nn.Conv2d(16, 32, 5), # input_size: [16,14,14] out_size: [32,10,10]
nn.Sigmoid(),
nn.AvgPool2d(2), # input_size: [32,10,10] out_size: [32,5,5]
nn.Flatten(), # 矩阵展开
nn.Linear(32 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10)
)
def forward(self, x):
x = self.model(x)
return x
"""
训练模型
"""
from tqdm import tqdm
import sys
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = LeNet()
model = model.to(device) # 设置在GPU中训练
# 损失函数
loss_fn = nn.CrossEntropyLoss().to(device)
# 优化器
learning_rate = 0.005
optimizer = torch.optim.Adam(model.parameters(), lr = learning_rate)
# 设置训练网络的参数
epochs = 5
# 添加tensorboard
#writer = SummaryWriter("./logs_train_CIFAR10")
# 开始训练
best= 0
for epoch in range(epochs):
print("-------第 {} 轮训练开始-------".format(epoch+1))
train_bar = tqdm(train_dataloader, file=sys.stdout)
model.train() #网络中有特殊层的时候需要加上,具体看文档,但加上不会出错
running_loss = 0.0
for step,data in enumerate(train_bar):
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = model(imgs)
loss = loss_fn(outputs, targets)
# 优化器优化模型
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.item()
train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,epochs, loss)
# 测试步骤开始
model.eval() # 网络中有特殊层的时候需要加上,具体看文档,但加上不会出错
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 取消梯度跟踪,进行测试 重要!!!
for data in test_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = model(imgs)
print(outputs.shape)
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
accurcy = (torch.max(outputs, dim=1)[1] == targets).sum().item()
total_accuracy = total_accuracy + accurcy
print('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %
(epoch + 1, running_loss / len(train_dataloader), total_accuracy/test_data_size))
if best < total_accuracy/test_data_size:
best = total_accuracy/test_data_size
torch.save(model.state_dict(), "./Model/LeNet_{}.path".format(epochs))
# 保存每一次训练的模型
print("------训练完毕-------")
# writer.close()
-------第 1 轮训练开始-------
train epoch[1/5] loss:1.944: 100%|██████████| 1563/1563 [00:12<00:00, 121.29it/s]
torch.Size([10000, 10])
[epoch 1] train_loss: 2.022 val_accuracy: 0.291
-------第 2 轮训练开始-------
train epoch[2/5] loss:1.620: 100%|██████████| 1563/1563 [00:12<00:00, 121.47it/s]
torch.Size([10000, 10])
[epoch 2] train_loss: 1.761 val_accuracy: 0.380
-------第 3 轮训练开始-------
train epoch[3/5] loss:1.420: 100%|██████████| 1563/1563 [00:12<00:00, 127.57it/s]
torch.Size([10000, 10])
[epoch 3] train_loss: 1.629 val_accuracy: 0.422
-------第 4 轮训练开始-------
train epoch[4/5] loss:1.791: 100%|██████████| 1563/1563 [00:12<00:00, 123.46it/s]
torch.Size([10000, 10])
[epoch 4] train_loss: 1.551 val_accuracy: 0.428
-------第 5 轮训练开始-------
train epoch[5/5] loss:1.358: 100%|██████████| 1563/1563 [00:12<00:00, 121.48it/s]
torch.Size([10000, 10])
[epoch 5] train_loss: 1.493 val_accuracy: 0.458
------训练完毕-------
模型预测
import os
import json
import torch
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
data_transform = transforms.Compose(
[transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# load image
img_path = "./dataset/horse.jpeg"
assert os.path.exists(img_path), "file: '{}' dose not exist.".format(img_path)
img = Image.open(img_path)
plt.imshow(img)
# [N, C, H, W]
img = data_transform(img)
# expand batch dimension
img = torch.unsqueeze(img, dim=0)
# read class_indict
class_indict = train_data.class_to_idx
class_indict = {v : k for k, v in class_indict.items()}
# create model
model = LeNet()
model = model.to(device) # 设置在GPU中训练
# load model weights
weights_path = "./Model/model_30.path"
model.load_state_dict(torch.load(weights_path))
model.eval()
with torch.no_grad():
# predict class
output = torch.squeeze(model(img.to(device))).cpu()
print(type(output))
predict = torch.max(output, dim=0)[1].item()
#print(predict.shape)
print(class_indict)
print_res = "class: {} ".format(class_indict[predict])
plt.title(print_res)
plt.show()
<class 'torch.Tensor'>
{0: 'airplane', 1: 'automobile', 2: 'bird', 3: 'cat', 4: 'deer', 5: 'dog', 6: 'frog', 7: 'horse', 8: 'ship', 9: 'truck'}
我的博客即将同步至腾讯云开发者社区,邀请大家一同入驻:https://cloud.tencent.com/developer/support-plan?invite_code=vm5tbzzl4e06


收获很多,谢谢
博主你这是看的什么视频写的笔记吗
Pytorch官方的tutorial